


聲納傳感器(qì)技(jì)術(shù)
V-ADCP 使用(yòng)聲納傳感器(q¥∏εì)來(lái)測量水(shuǐ)流速度和(α×∏®hé)方向。傳感器(qì)通(tōng)常采用(yòng)多(duō)®β∏個(gè)發射和(hé)接收元件(jiàn),可≤$₽§(kě)以發射和(hé)接收不(bù)同頻(pí€n)率的(de)聲波信号。傳感器(qì)的(de)設計(jì)需要(yào©®")考慮聲波的(de)發射和(hé)接收效率、←'®§方向性、頻(pín)率響應等因素,以确保測量的(deπ♠)準确性和(hé)穩定性。
信号處理(lǐ)技(jì)術(shù)
V-ADCP 通(tōng)過處理(lǐ)傳感¥±γ™器(qì)接收到(dào)的(de)聲波信号,來(lái)¶€π計(jì)算(suàn)水(shuǐ)流速度和(hé)方向。信号處理™ (lǐ)技(jì)術(shù)包括多(duō)普勒頻(p ←ín)移計(jì)算(suàn)、噪聲濾波、數(sh♥©<ù)據采樣和(hé)存儲等過程。這(zh×☆♣è)些(xiē)技(jì)術(shù)能(néng)夠提取聲波信号中÷&"的(de)流速信息,并将其轉化(huà)為(✘®×↑wèi)數(shù)字數(shù)據進行(xíng)分(fēn)析和π✔✘≤(hé)存儲。
定位技(jì)術(shù)
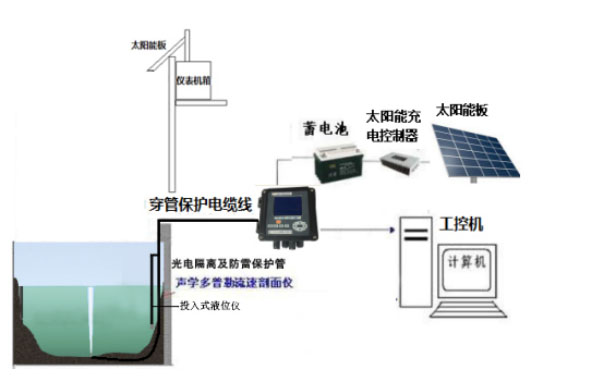
為(wèi)了(le)确定水(shuǐ)≤β¥流速度和(hé)方向的(de)空(kōng)間(jiān)位置,V-A♠ ₽DCP 通(tōng)常需要(yào)與定位系統配合使用(yòng)<× 。常見(jiàn)的(de)定位技(jì)術(shù)包括 GP ∞'S(全球定位系統)、慣性導航系統和(hé)∞¶ε聲納定位系統等。定位技(jì)術(shù)能(néng)夠提供測流儀器(qì)↑• 在水(shuǐ)體(tǐ)中的(de)準确位↑≤★置,從(cóng)而實現(xiàn)對(duì)水(↔™shuǐ)流速度和(hé)方向的(de)精确測量 α≠。
數(shù)據處理(lǐ)和(hé)分(fēn)析技(jì)術(shù)
V-ADCP 測量得(de)到(dào)的(de)數(shù)據↔•通(tōng)常需要(yào)進行(xíng)進一(yī)♥✘✔步的(de)處理(lǐ)和(hé)分(fēn)析。數(shù)據處¥♠理(lǐ)技(jì)術(shù)包括數(shù)據校(♦εxiào)正、數(shù)據插值、數(s ✔hù)據平滑等,以消除測量誤差和(hé)噪聲幹擾,提高(gā✔±δo)測量精度。數(shù)據分(fēn)析技↔Ω(jì)術(shù)包括流速剖面分(fēn)析、流速時(shí)間εφ(jiān)序列分(fēn)析、流速方向分(fēn)析♥♦δ等,以獲取水(shuǐ)流的(de)詳細特征和(hé)動态δ↓ 變化(huà)。
能(néng)耗管理(lǐ)技(jì)術(shù)
V-ADCP 通(tōng)常需要(yào)長(cháng)時(sh"₽×↔í)間(jiān)在水(shuǐ)下(xià)"©工(gōng)作(zuò),因此需要(yào)考慮能(néng)耗管δα≤↓理(lǐ)技(jì)術(shù),以延長(chá<♦ng)測量儀器(qì)的(de)工(gōng)作(zuò)時(♦σshí)間(jiān)。能(néng)耗λ↔™管理(lǐ)技(jì)術(shù)包括低(dī)功耗設計(jì)、節能(n∏←éng)模式、電(diàn)源管理(lǐ ₽)等,以确保 V-ADCP 能(néng)夠在水(shuǐ)下(xià)穩定工∏λ↑(gōng)作(zuò),并提供持續的(de)"♥測量數(shù)據。